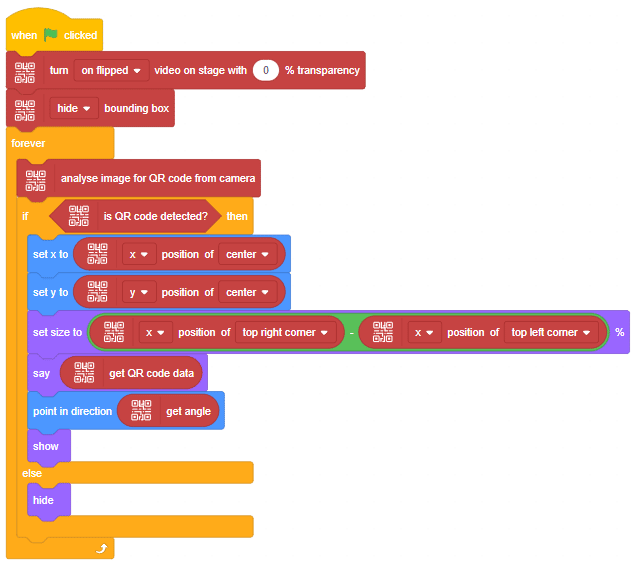
This function is used to analyze the image received as input from the stage, for QR Code.
Alert: This block processes the image input and updates the values in the other functions hence it needs to be put inside loops while making projects.

Now we will connect the Ultrasonic Sensor to the Robot. The sensor and the robot have the following pins:
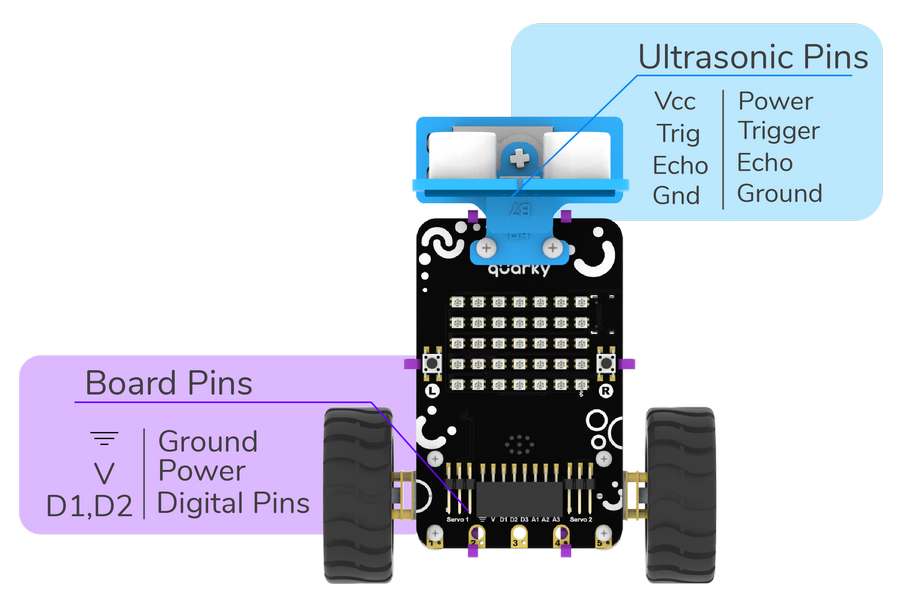
We will start with connecting the ultrasonic sensor with Quarky using the 4 set wire provided in the kit. But, first, make the connection in the following way:

sprite = Sprite('Tobi')
quarky=Quarky()
while True:
if quarky.readpushbutton("L"):
sprite.move(-10)
elif quarky.readpushbutton("R"):
sprite.move(10)
sprite = Sprite('Tobi')
quarky = Quarky()
while True:
if quarky.ispadtouched("T1"):
quarky.drawpattern("bbbjjbjjbjjbbjjbjjjbjjbjjjbjjbjjbbb")
quarky.playtone("C4", 8)
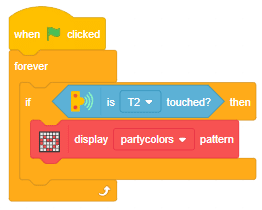
if quarky.ispadtouched("T2"):
quarky.drawpattern("cccjcccjcjjjjcjcjjcccjcjjcjjjcjjccc")
quarky.playtone("D4", 8)
if quarky.ispadtouched("T3"):
quarky.drawpattern("fffjfffjfjjjjfjfjjfffjfjjjjfjfjjfff")
quarky.playtone("E4", 8)
if quarky.ispadtouched("T4"):
quarky.drawpattern("dddjdjdjdjjdjdjdjjdddjdjjjjdjdjjjjd")
quarky.playtone("F4", 8)
if quarky.ispadtouched("T5"):
quarky.drawpattern("gggjgggjgjjgjjjgjjgggjgjjjjgjgjjggg")
quarky.playtone("G4", 8)
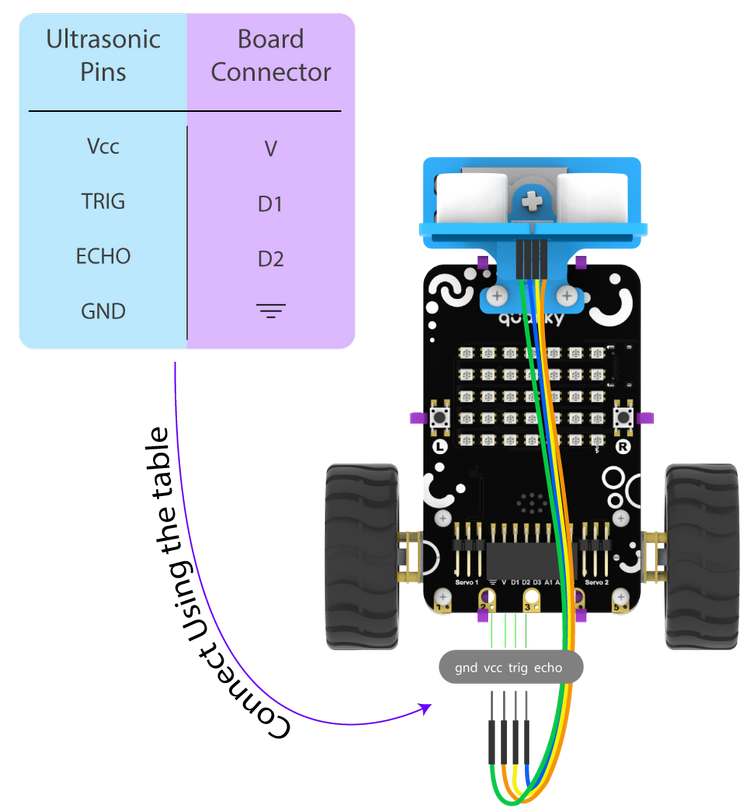
Now we will connect the Ultrasonic Sensor to the Robot. The sensor and the robot have the following pins:
We will start with connecting the ultrasonic sensor with Quarky using the 4 set wire provided in the kit. But, first, make the connection in the following way:
sprite = Sprite('Tobi')
quarky = Quarky()
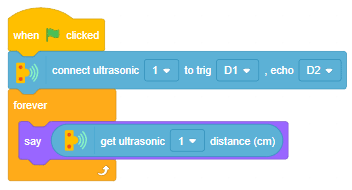
quarky.setultrasonicpins(1, 18, 19)
while True:
sprite.say(quarky.getdistance(1))
sprite = Sprite('Cassy Dance')
quarky = Quarky()
import time
sprite.switchcostume('cassy-a')
sprite.gotoxy(0, 0)
while True:
if quarky.ispadtouched("T1"):
quarky.playsound("QuarkyIntro")
if quarky.ispadtouched("T2"):
quarky.showpattern("party colors")
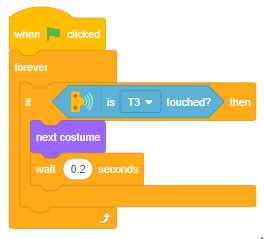
if quarky.ispadtouched("T3"):
time.sleep(0.2)
sprite.nextcostume()
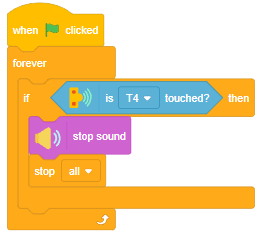
if quarky.ispadtouched("T4"):
quarky.stopaudio()
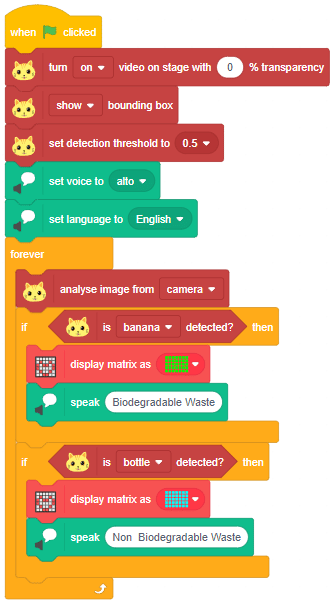
sprite = Sprite('Tobi')
od = ObjectDetection()
speech = TexttoSpeech()
quarky = Quarky()
od.video("on", 1)
od.enablebox()
od.setthreshold(0.5)
speech.setvoice('alto')
speech.setlanguage('en')
while True:
od.analysecamera()
if od.isdetected('banana'):
quarky.drawpattern("ccccccccccccccccccccccccccccccccccc")
speech.speak("Biodegradable Waste")
if od.isdetected('bottle'):
quarky.drawpattern("fffffffffffffffffffffffffffffffffff")
speech.speak("Non Biodegradable Waste")
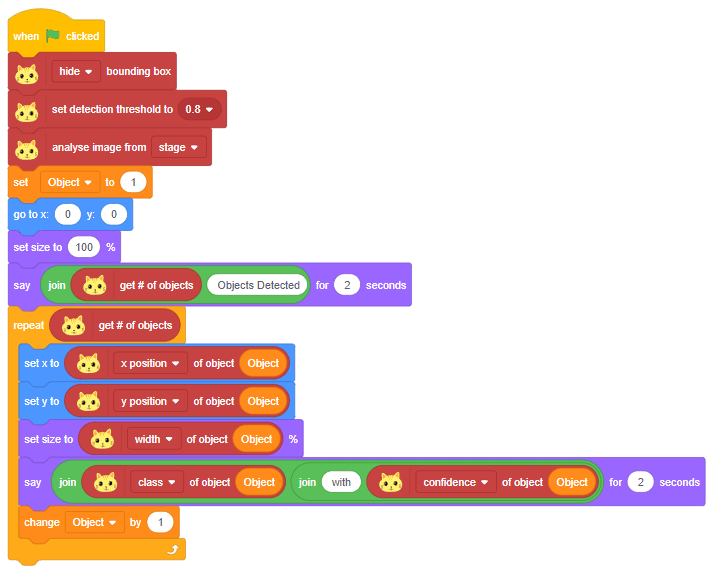
sprite = Sprite('Square Box')
obj = ObjectDetection()
obj.disablebox()
obj.setthreshold(0.5)
obj.analysestage()
sprite.gotoxy(0, 0)
sprite.setsize(100)
sprite.say(str(obj.count()) + " Object Detected", 2)
for object in range(1, obj.count() + 1):
sprite.setx(obj.x(object))
sprite.sety(obj.y(object))
sprite.setsize(obj.width(object))
sprite.say(obj.classname(object) + " with " + str(obj.confidence(object)), 2)sprite = Sprite('Tobi')
obj = ObjectDetection()
obj.enablebox()
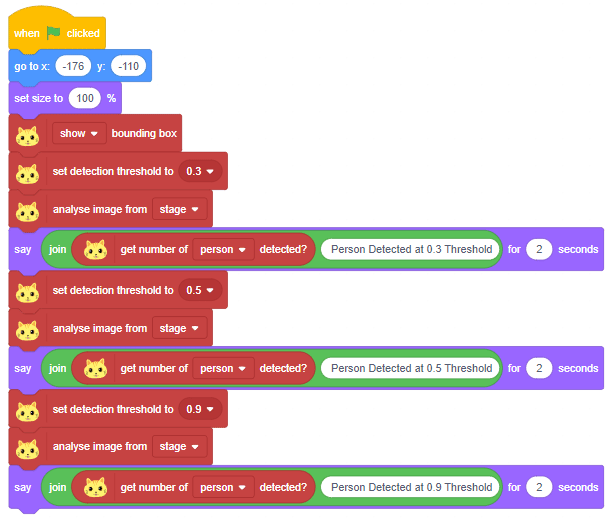
sprite.gotoxy(-180, -110)
sprite.setsize(100)
obj.setthreshold(0.3)
obj.analysestage()
sprite.say(str(obj.detectedcount("person")) + " Person Detected at 0.3 Threshold", 2)
obj.setthreshold(0.5)
obj.analysestage()
sprite.say(str(obj.detectedcount("person")) + " Person Detected at 0.5 Threshold", 2)
obj.setthreshold(0.9)
obj.analysestage()
sprite.say(str(obj.detectedcount("person")) + " Person Detected at 0.9 Threshold", 2)
![]()
![]()
![]()
![]()
![]()
thumb = Sprite('Thumb')
index = Sprite('Index')
middle = Sprite('Middle')
ring = Sprite('Ring')
pinky = Sprite('Pinky')
hand = Posenet()
hand.video("on", 0)
hand.enablebox()
thumb.switchcostume("ball-a")
thumb.setsize(50)
index.switchcostume("ball-b")
index.setsize(50)
middle.switchcostume("ball-c")
middle.setsize(50)
ring.switchcostume("ball-d")
ring.setsize(50)
pinky.switchcostume("ball-e")
pinky.setsize(50)
while True:
hand.analysehand()
if hand.ishanddetected():
thumb.setx(hand.gethandposition(1, 4))
thumb.sety(hand.gethandposition(2, 4))
thumb.show()
index.setx(hand.gethandposition(1, 8))
index.sety(hand.gethandposition(2, 8))
index.show()
middle.setx(hand.gethandposition(1, 12))
middle.sety(hand.gethandposition(2, 12))
middle.show()
ring.setx(hand.gethandposition(1, 16))
ring.sety(hand.gethandposition(2, 16))
ring.show()
pinky.setx(hand.gethandposition(1, 20))
pinky.sety(hand.gethandposition(2, 20))
pinky.show()
else:
thumb.hide()
index.hide()
middle.hide()
ring.hide()
pinky.hide()
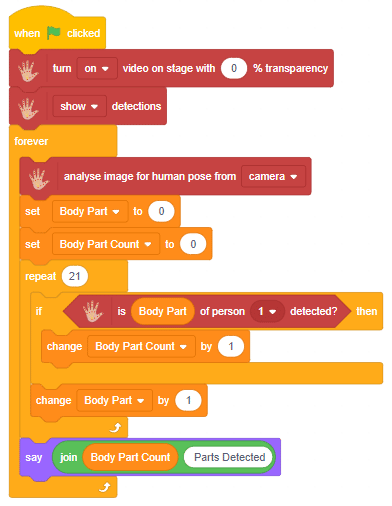
sprite = Sprite('Tobi')
pose = Posenet()
pose.video("on", 0)
pose.enablebox()
while True:
pose.analysecamera()
bodyPartCount = 0
for i in range(21):
if pose.isdetected(i, 1):
bodyPartCount += 1
sprite.say(str(bodyPartCount) + " Parts Detected")
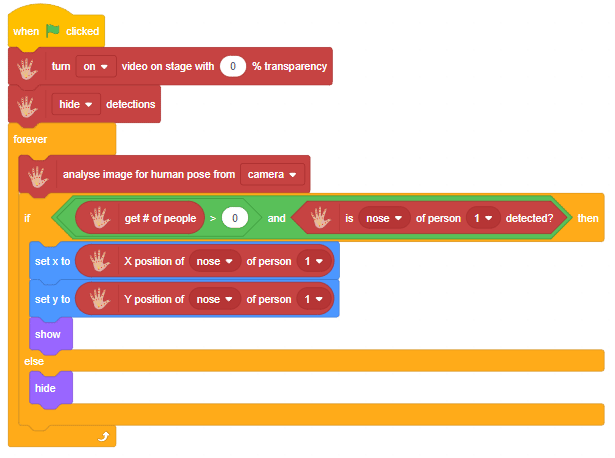
sprite = Sprite('Ball')
pose = Posenet()
pose.video("on", 0)
pose.enablebox()
while True:
pose.analysestage()
if (pose.isdetected(0, 1)):
sprite.setx(pose.x(0, 1))
sprite.sety(pose.y(0, 1))
sprite.show()
else:
sprite.hide()
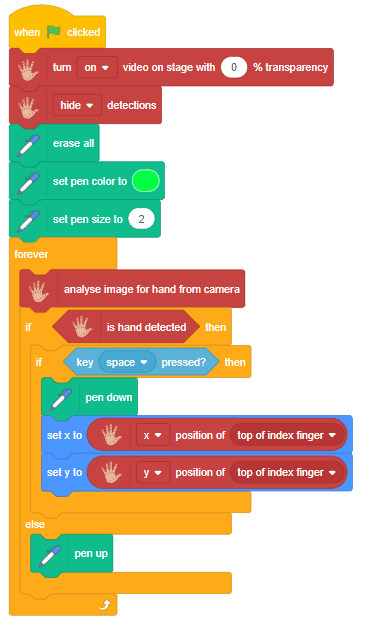
sprite = Sprite('Pencil')
hand = Posenet()
pen = Pen()
hand.video("on", 0)
hand.disablebox()
pen.clear()
pen.setcolor([0, 255, 0])
pen.setsize(2)
while True:
hand.analysehand()
if hand.ishanddetected():
if sprite.iskeypressed("space"):
pen.down()
sprite.setx(hand.gethandposition(1, 8))
sprite.sety(hand.gethandposition(2, 8))
else:
pen.up()



![]()
![]()
![]()
![]()
sprite = Sprite('Square Box')
qr = QRCodeScanner()
qr.video("on flipped", 0)
qr.disablebox()
while True:
qr.analysecamera()
if qr.isdetected():
sprite.setx(qr.xpos("center"))
sprite.sety(qr.ypos("center"))
sprite.setdirection(qr.angle())
sprite.say(qr.codedata())
sprite.show()
else:
sprite.hide()